Simulation and analysis of 3-RPR parallel robot
Date: September – December 2020 (Course project)
We conducted analysis and simulation of an assistive parallel robot mentioned in ref [1-2].The kinematic analysis and mechanical strength verification are realized.
Methodology
This robot system mainly consists of a base, a platform, and three driving links. The motion platform of the parallel robot is supported by three arm structures with consistent kinematics. Each arm is composed of a sequential arrangement of a rotational joint (R), a drivable prismatic joint (P), and another rotational joint (R), connecting the mobile base and the robot motion platform. With respect to the mechanical structure model, we conducted kinematic and differential kinematic analysis as well as workspace visualization.
![Fig. 1 Structure diagram of parallel robot. (a) Structure of the proposed multi-function mobility assistive device [1]. (b) Schematic of 3-RPR parallel robot.](/../images/RPR1.jpg)
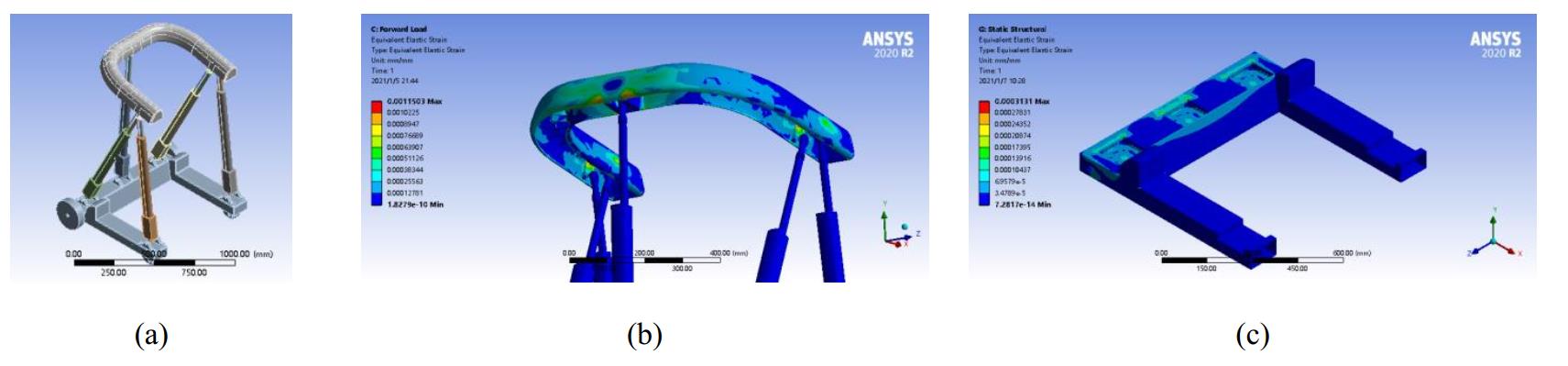
In order to verify the structural strength of the model, ANSYS simulation analysis is used. The connection at the articulation is simplified, and the simplified model obtained is shown in Fig 2.
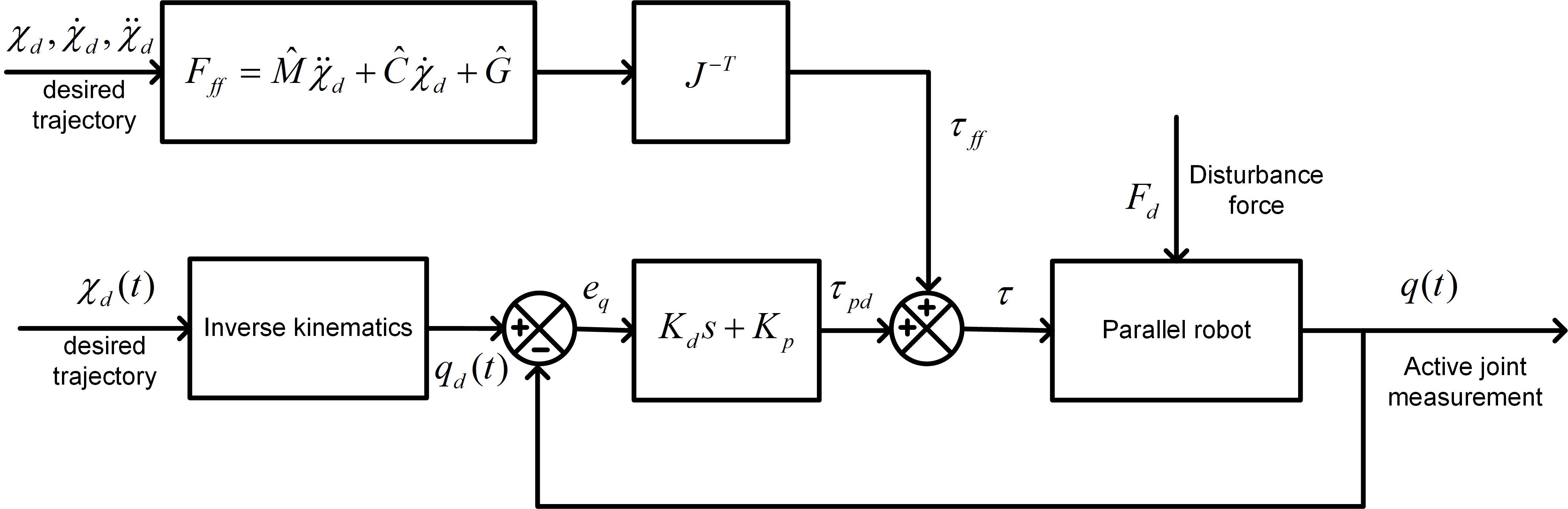
Finally, we conducted joint dynamic simulations of the model using a combination of ADAMS and MATLAB. Simple PD controllers showed poor tracking performance under different conditions, especially in the presence of measurement noise and external disturbances. To compensate for these effects, a feedforward term
The closed-loop dynamic equation of the robotic arm in joint space is given by:
From this, the control block diagram can be derived as shown in Fig 3. There is a simulation result of single degree of freedom control for Link 3.
Result
References
[1] A. Asker, S. F. M. Assal and A. M. Mohamed, “Dynamic Analysis of a Parallel Manipulator-Based Multi-function Mobility Assistive Device for Elderly,” 2015 IEEE International Conference on Systems, Man, and Cybernetics, Hong Kong, China, 2015, pp. 1409-1414, doi: 10.1109/SMC.2015.250.
[2] A. Asker and S. F. M. Assal, “Kinematic analysis of a parallel manipulator-based multi-function mobility assistive device for elderly,” 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea (South), 2015, pp. 676-681, doi: 10.1109/AIM.2015.7222615.
Simulation and analysis of 3-RPR parallel robot