Siasun-SR10A-Robot analysis and force feedback control simulation
Date: March – August 2020 (Course project)
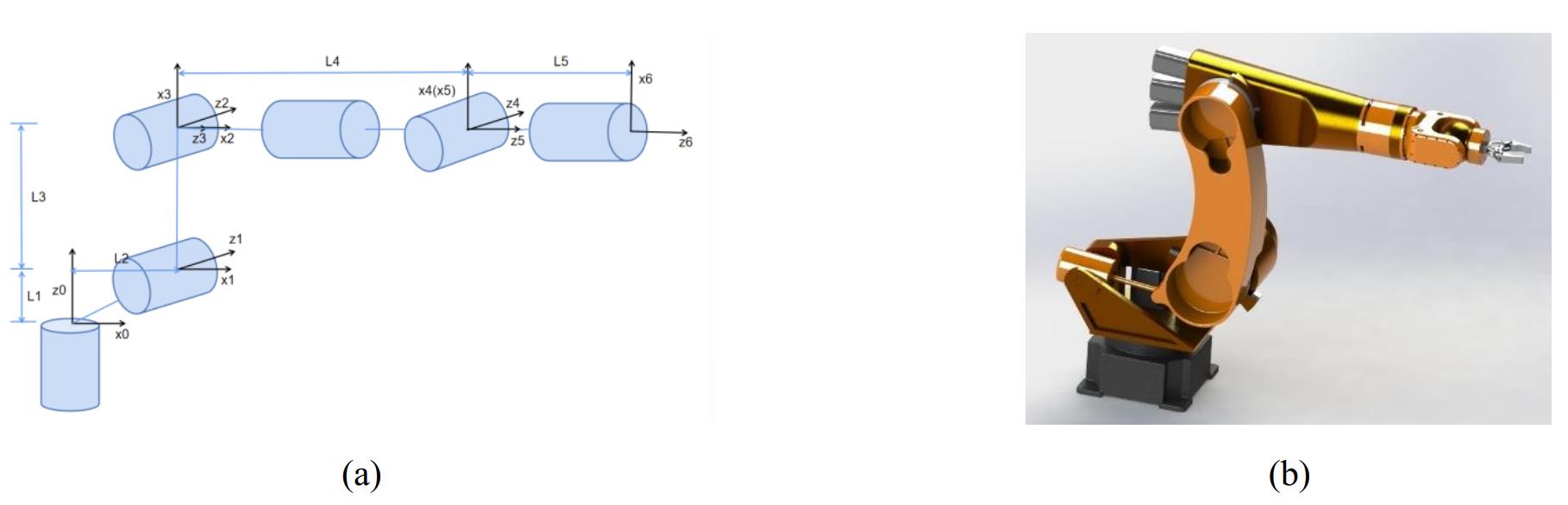
In this project, D-H modeling method is used to conduct mathematical modeling for the industrial six-axis robot arm. On this basis, the admittance controller based on the end sensor is designed, and the simulation of SINMULINK force position hybrid control in the end peg-in-hole assembly process is completed.
Methodology
The robot model is shown in Fig 1.
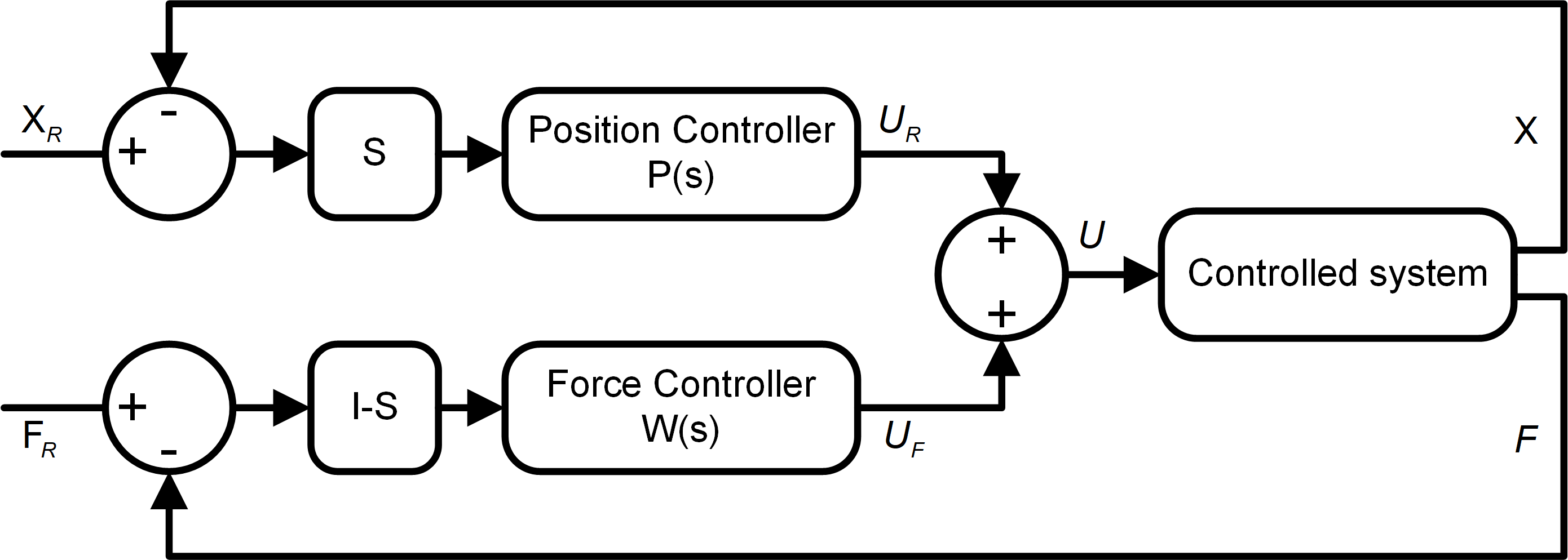
In the process of peg-in-hole assembly, a hybrid control of force position is adopted. The diagonal selection matrix S determines the specific control mode, P and W represent the position control law and the force control law respectively, and U represents the controller output, as shown in Fig 2.
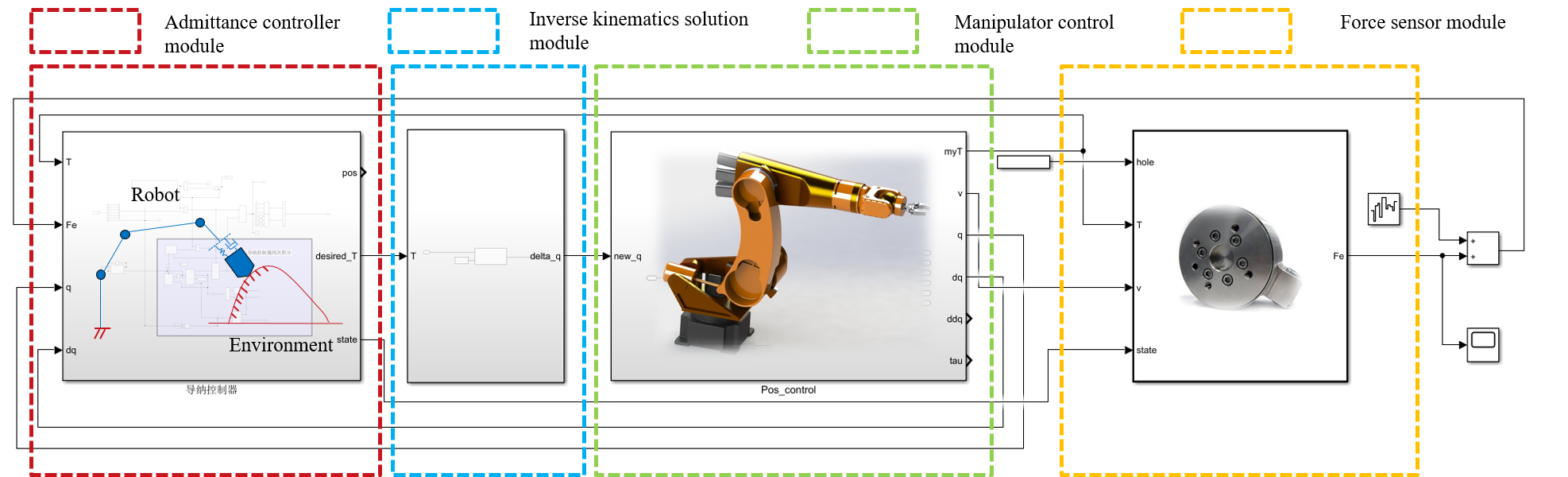
The peg-in-hole assembly is divided into the approach stage (position control), the hole search stage (force position mixed control) and the jack stage (force control), the hole search stage needs to ensure that the Z-axis direction of the shaft and the plane contact is a constant contact force of the flexible control. SIMULINK design block diagram is shown below.
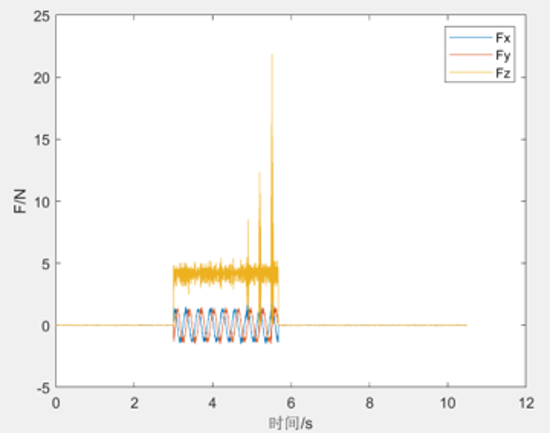
Result
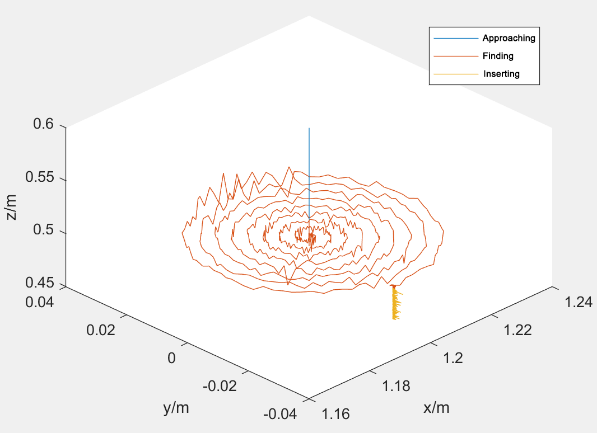
SIMULINK simulation results are shown in Fig 4 and Fig 5.
 |
 |
|---|
Siasun-SR10A-Robot analysis and force feedback control simulation