Underactuated adaptive manipulator design
Date: September 2019 – January 2020 (Course project)
Inspired by the structure of the human hand, the underactuated adaptive robotic arm aims to achieve adaptive and stable grasping of objects with different shapes, materials, and weights, all within a small volume, low power, and simple mechanical structure.
Methodology
Our project is based on the Model T robotic hand proposed by Yale University’s OpenHand project team [1], with additional functionalities and improvements made to the mechanical structure, specifically tailored for the complex sorting scenarios in large-scale e-commerce warehouses. Model diagrams and physical images are depicted in the figure.The device is capable of grasping various objects of different shapes and exhibites excellent adaptability.
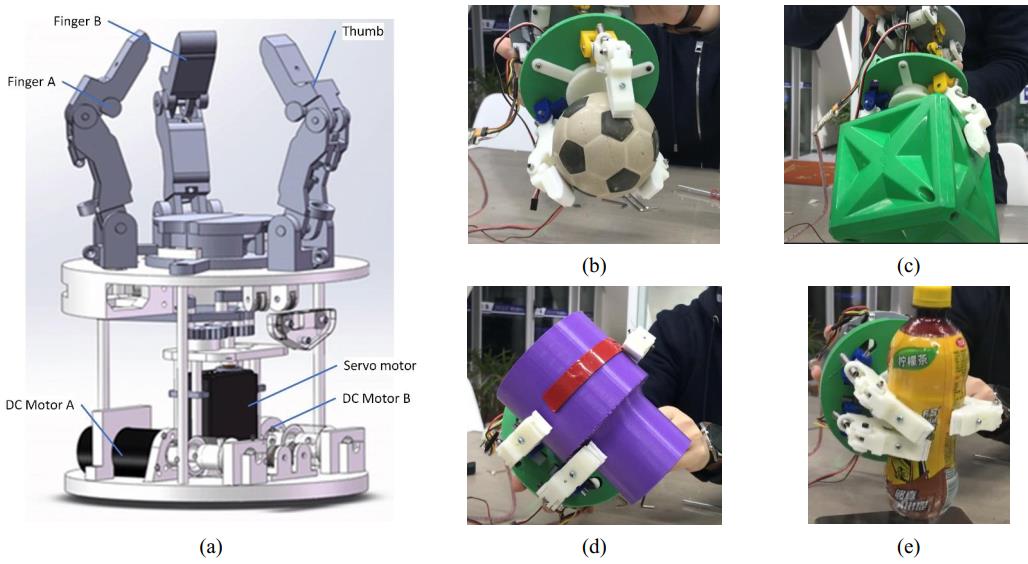
The servo motor controls the positions of Finger A and Finger B, enabling two gripping modes: parallel grasping (AB fingers together) or separate grasping (AB fingers apart). In this setup, both Finger A and Finger B are controlled by a single motor, referred to as Motor A. The underactuated grasping is achieved through a differential mechanism composed of a linear drive and pulley system.
References
[1] R. R. Ma, L. U. Odhner and A. M. Dollar, “A modular, open-source 3D printed underactuated hand,” 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 2013, pp. 2737-2743, doi: 10.1109/ICRA.2013.6630954.
Underactuated adaptive manipulator design