RoboMaster University Championship 2019
Date: September 2018 – August 2019
RoboMaster University Championship (RMUC) focuses on the comprehensive application of science and technology and engineering practice ability of the participants.
RMUC fully integrates “machine vision”, “embedded system design”, “mechanical control”, “inertial navigation”, “human-computer interaction” and many other robot-related technical disciplines.
I competed in RMUC 2018 and designed the mechanical structure of the standard robot, as shown in Fig 1,2.
 |
 |
|---|
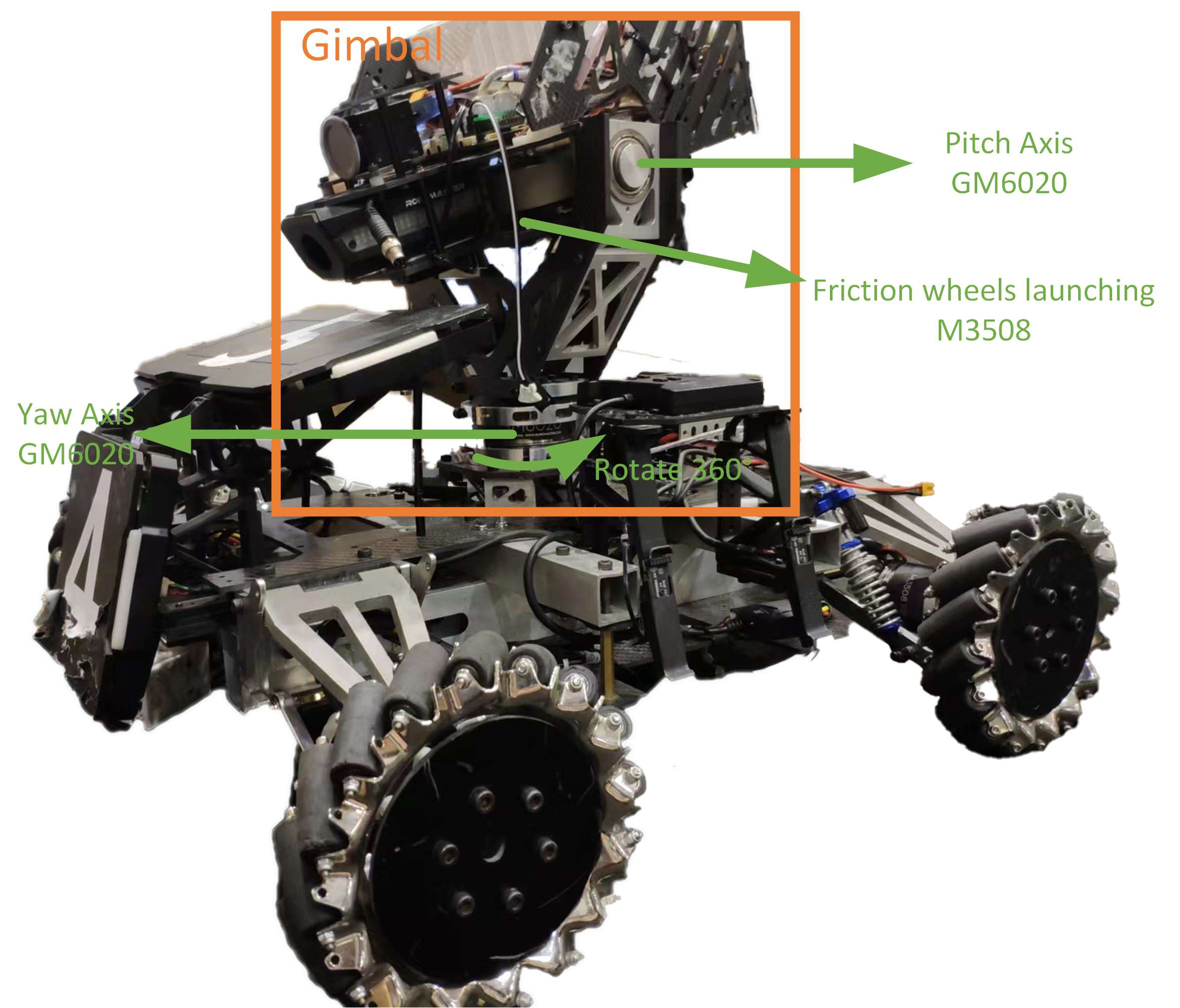
During the robot competition held in 2018-2019, I was responsible for designing a two-degree-of-freedom gimbal for a robot, as shown in Fig 3. The structure resembled a camera stabilizer, but it featured a specialized launching mechanism mounted on top, as required by the competition.
- Framework: I utilized two GM6020 brushless DC motors to control the rotation of the gimbal along its yaw and pitch axes. The gimbal was connected to the robot’s chassis through an electrical slip ring, enabling it to rotate freely within a 360-degree range.
- Launching mechanism: The launching mechanism relied on two friction wheels to accurately launch small projectiles. To achieve this, I removed the reduction gearbox from M3508 gear motors and repurposed it to power friction wheels.
RoboMaster University Championship 2019